A következő oktató videóban a Dunára küldünk egy rovert, plusz két is méretű műholdat (ScanSat 2 Satelit).
Először természetesen létre kellet hozni magát a járművet, és hozzá a leszállást biztosító elemeket. A rovernél elsődleges szempontnak azt tűztem ki, hogy stabil legyen, vagyishogy ne boruljon fel könnyen hiszen az a kutatás végét jelentené. Ezért széles-hosszú járművet készítettem el elsőnek.

Ezt még tesztelni is kell, hogy valóban minden megfelelően működik, tehát alá illesztettem egy kisebb rakéta egységet.

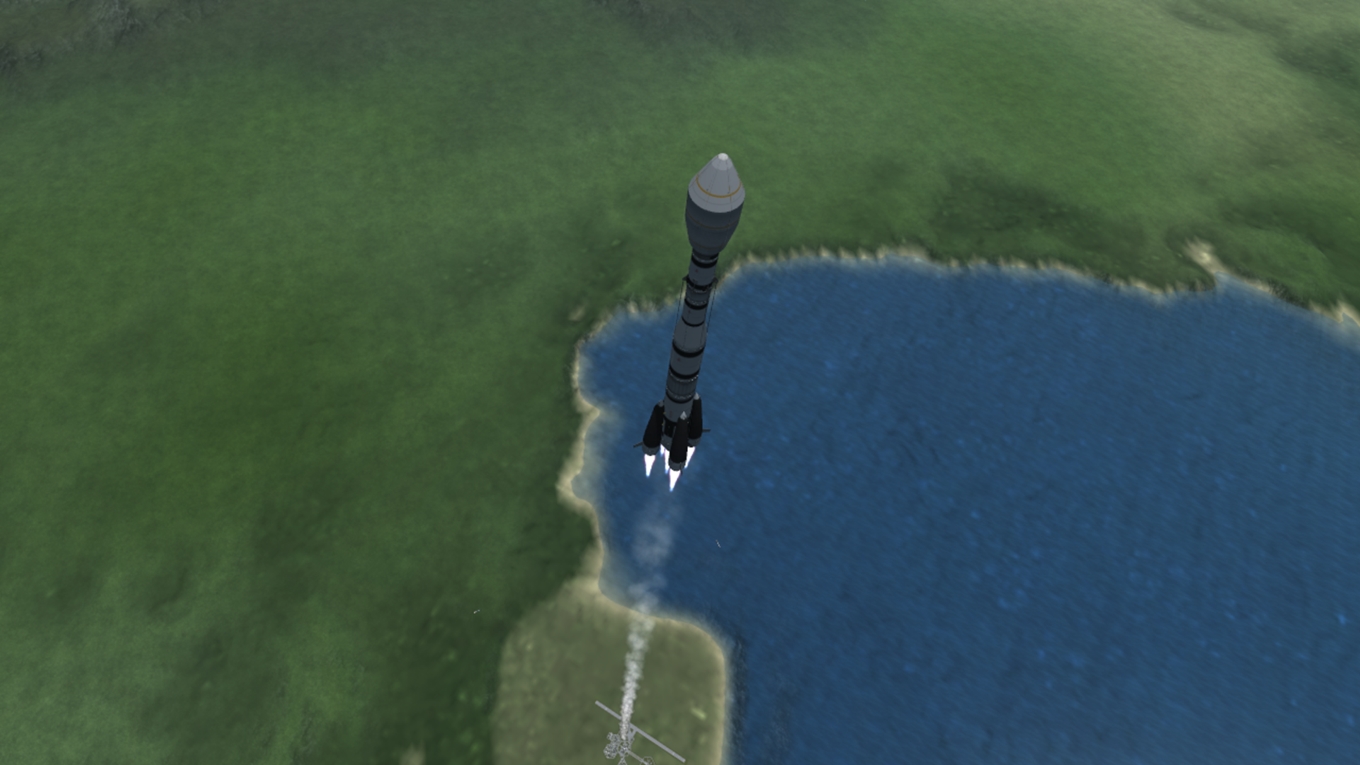
A felszállásnál két kilométer magasság után bedöntöttem a járművet, a szárazföld irányába. Ez két okból jó. Először is, ha bármi probléma adódik, vagy a leválasztott rakéta fokozat nem az épületekre esik vissza(ez főleg a Karrier módban dolgozókat érinti), és másodszorra, hogy ne a tengerre érkezzen a rover.

A rover leszálló egységét ilyen csepp formára készítettem, alján hővédő pajzzsal, és végezte is a dolgát rendesen, szépen fenékkel lefele esett. Az „Ablatort”(hővédő pajzs anyaga) visszavettem 90 egységre, hiszen a Duna ritka légkörében ez is bőséggel elegendő, illetve a tesztelés alatt sem kellet több. Ezzel rengeteg súlyt lehetett megspórolni!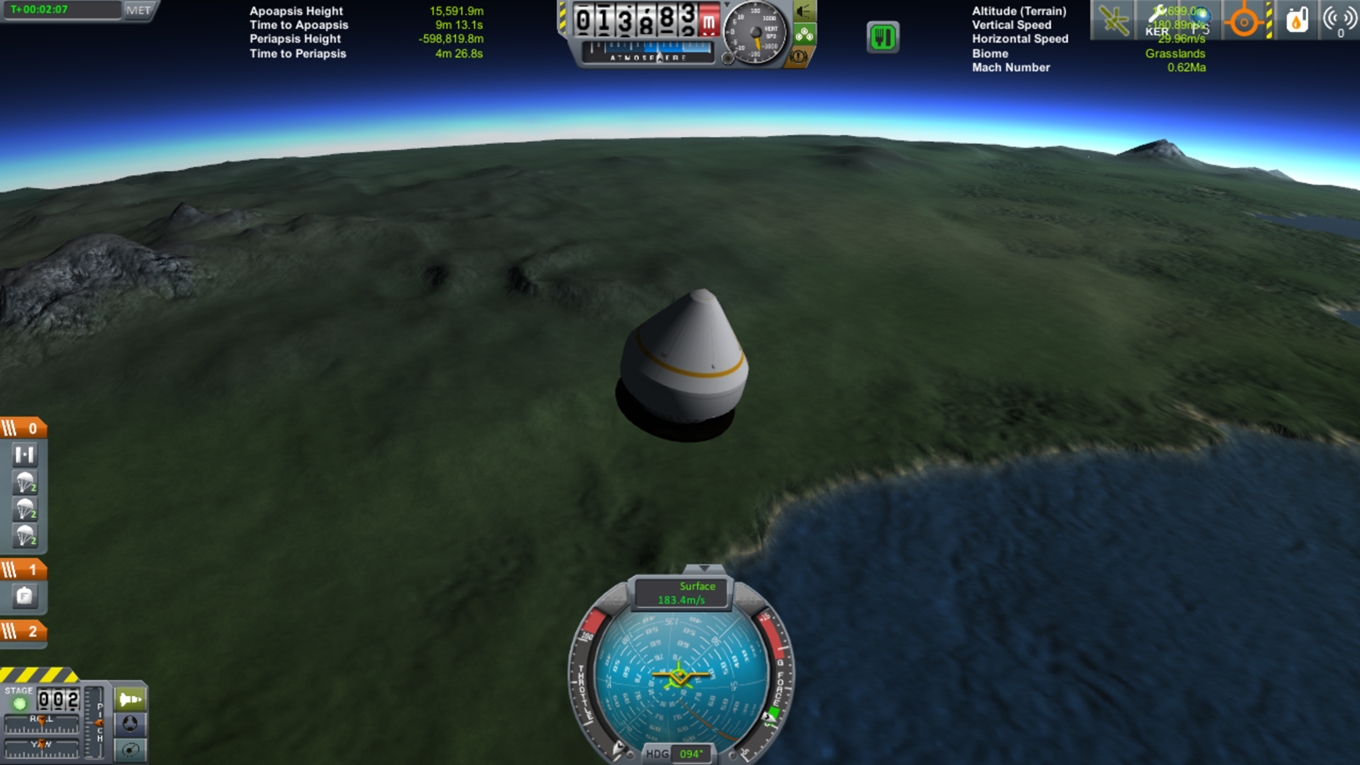
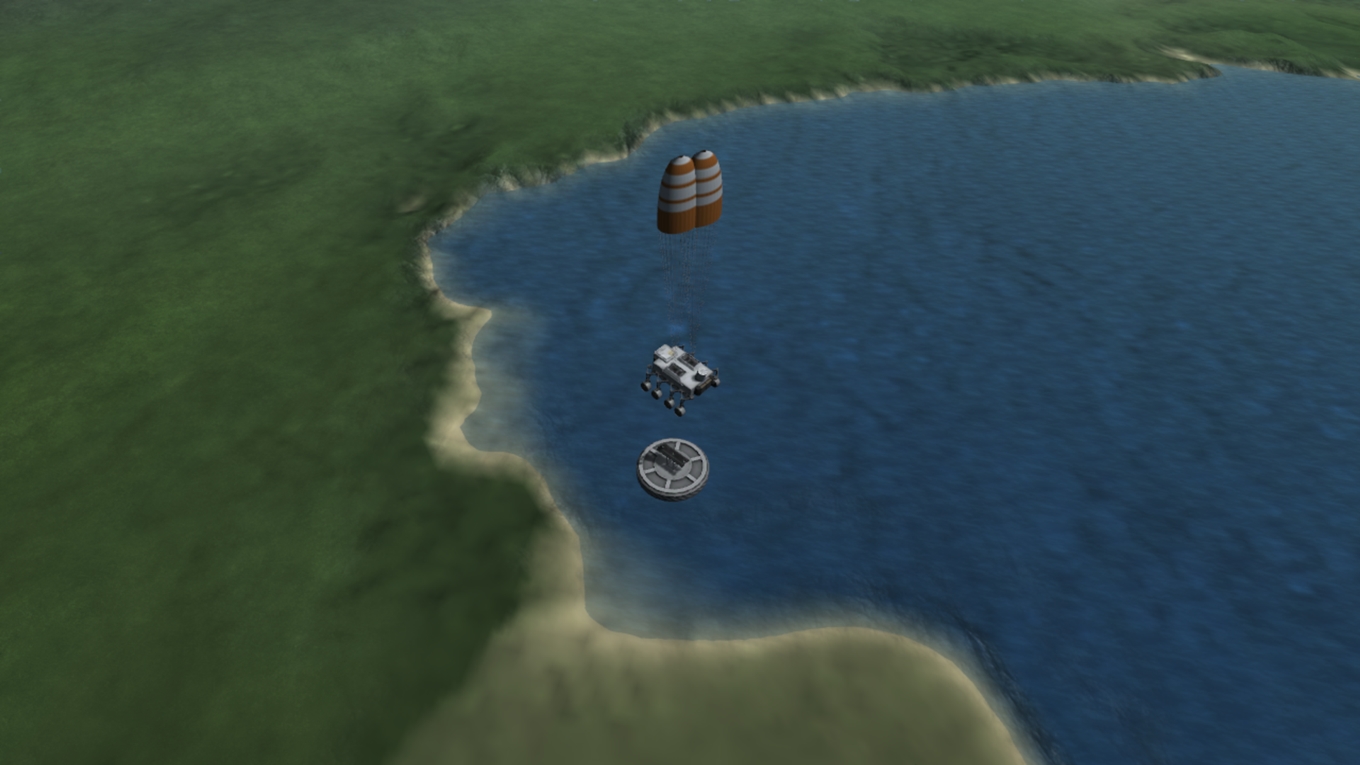
Az ejtőernyők nyitásával a hővédő pajzs és a „csepp” burkolat is levált, az eszköz szépen ereszkedett lefelé.

Az ejtőernyők belobbanása után megfelelő sebességgel ereszkedett a roverünk. Természetesen a Dunán a kisebb légkörben ennél több ejtőernyőre lesz szükség!

Elsőként a napelemekkel feltöltöttük az akkumulátorokat, hiszen a súlyspórolás jegyében azok kapacitása nem túl sok.

Ezután nem maradt más mint a próba út, a rendszerek teljes vizsgálata, stb.
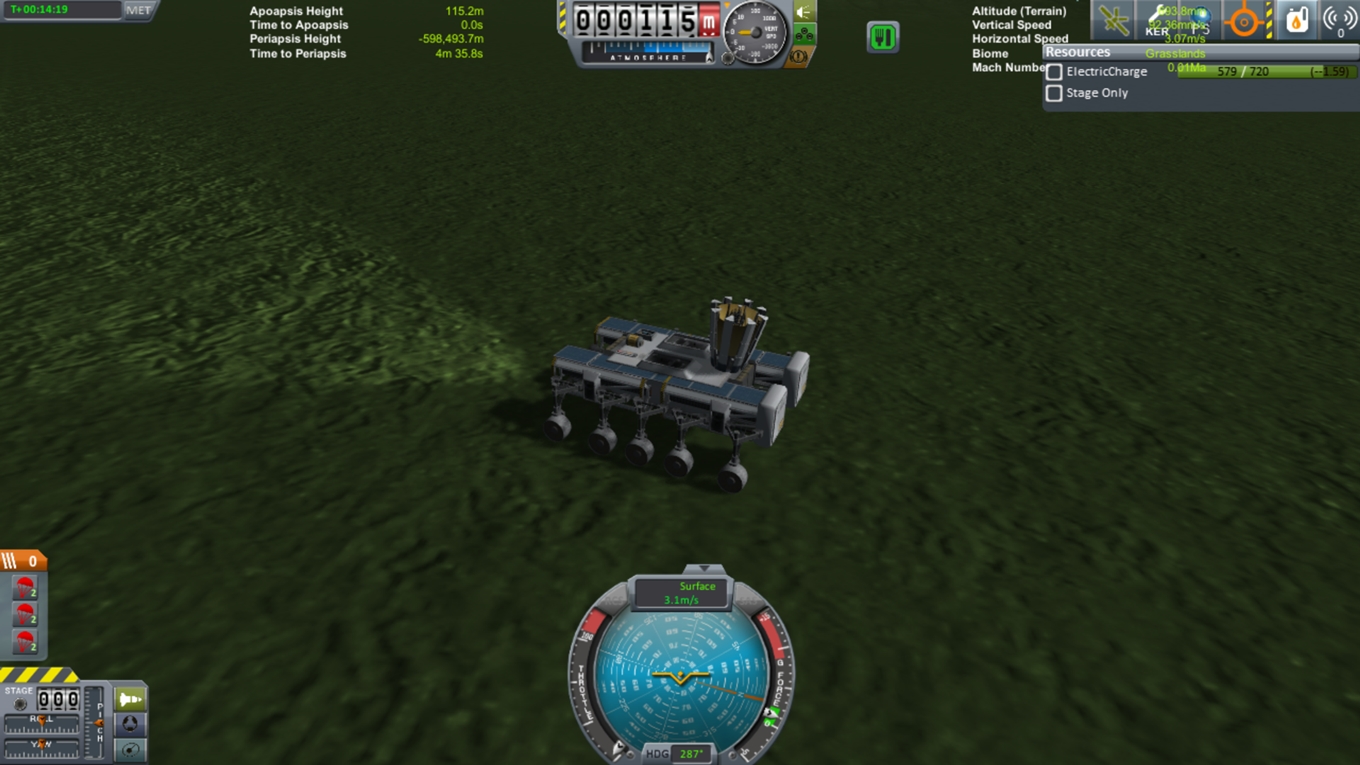
Sajnálatos módon, kiderült, hogy a rendszer túl nehéz (kb.:1600 kg), ezáltal a kerekek fékjei, motorjai azt nem képesek megfelelő módon lefékezni 6 m/s sebesség felett. Tehát a stabilitás jegyében létrehozott jármű sajnos nem váltotta be a reményeket. Ezekhez a kerekekhez, új jóval könnyebb járművet kell alkotni, máshol kell kompromisszumot kötni.
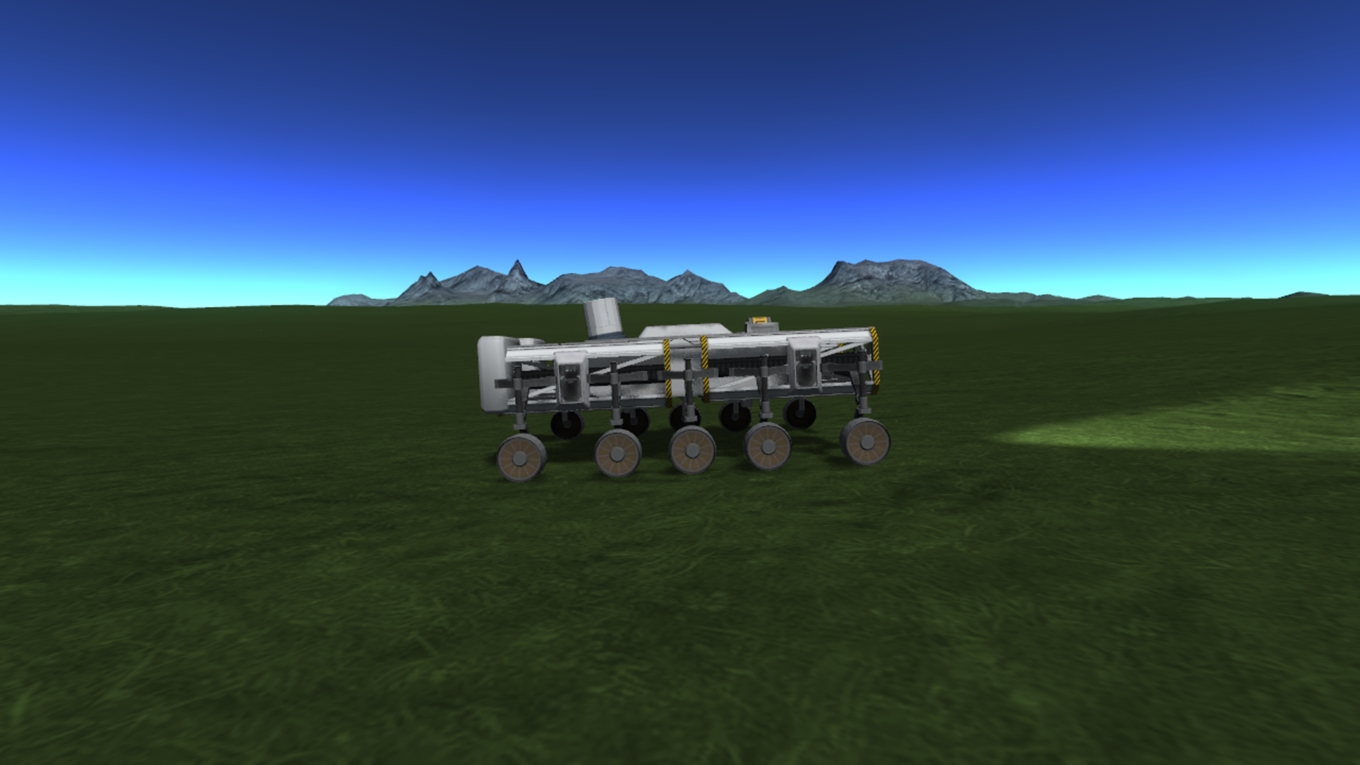
Ez már a második teszt roverünk, jelentősen kisebb, igaz még a műszerek nincsenek rajta, de így is sikerült megfelezni a súlyt(700 kg)! Természetesen ez kevésbé stabil, de ezt a kompromisszumot kénytelen voltunk megkötni. Egyszerűen csak oda kell majd figyelni az irányításnál, hová és hogyan vezetjük a járművet.
Az ejtő ernyők használatával a leszállást biztosító elemek rendben leváltak, szerencsére itt nincs hiba.
Az ernyők megfelelően kis sebességgel helyezték talajra a járművet, De a Dunához majd még egy ernyőt azért fel kell helyezni. A földi próbáknál kiderült, hogy a jármű remekül irányítható, megfelelően lehet teljes mértékben lefékezni szinte bármilyen helyzetben. Tehát a második teszt sikerrel zárult!

Ezután nem maradt hátra más mint a hordozó járműre illeszteni, illetve fel lőni a kész űrrakétát.
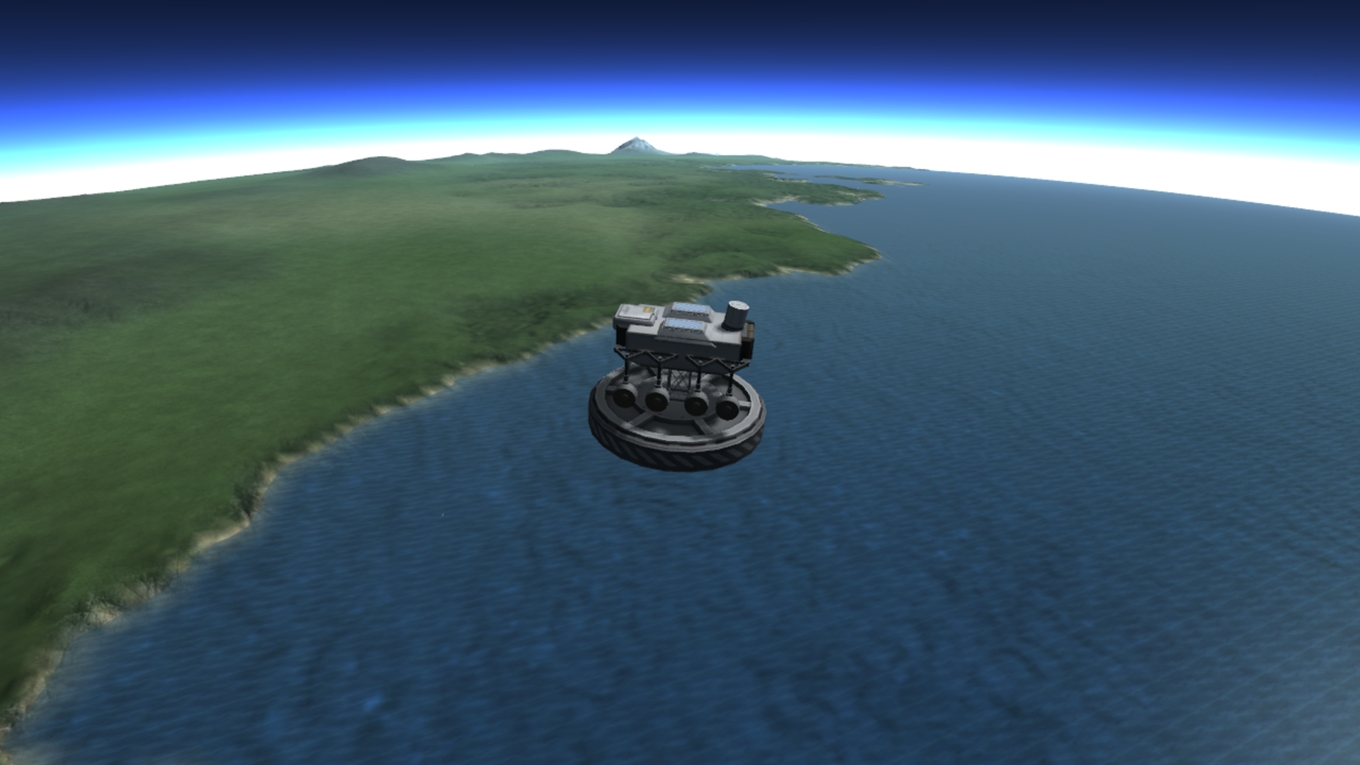
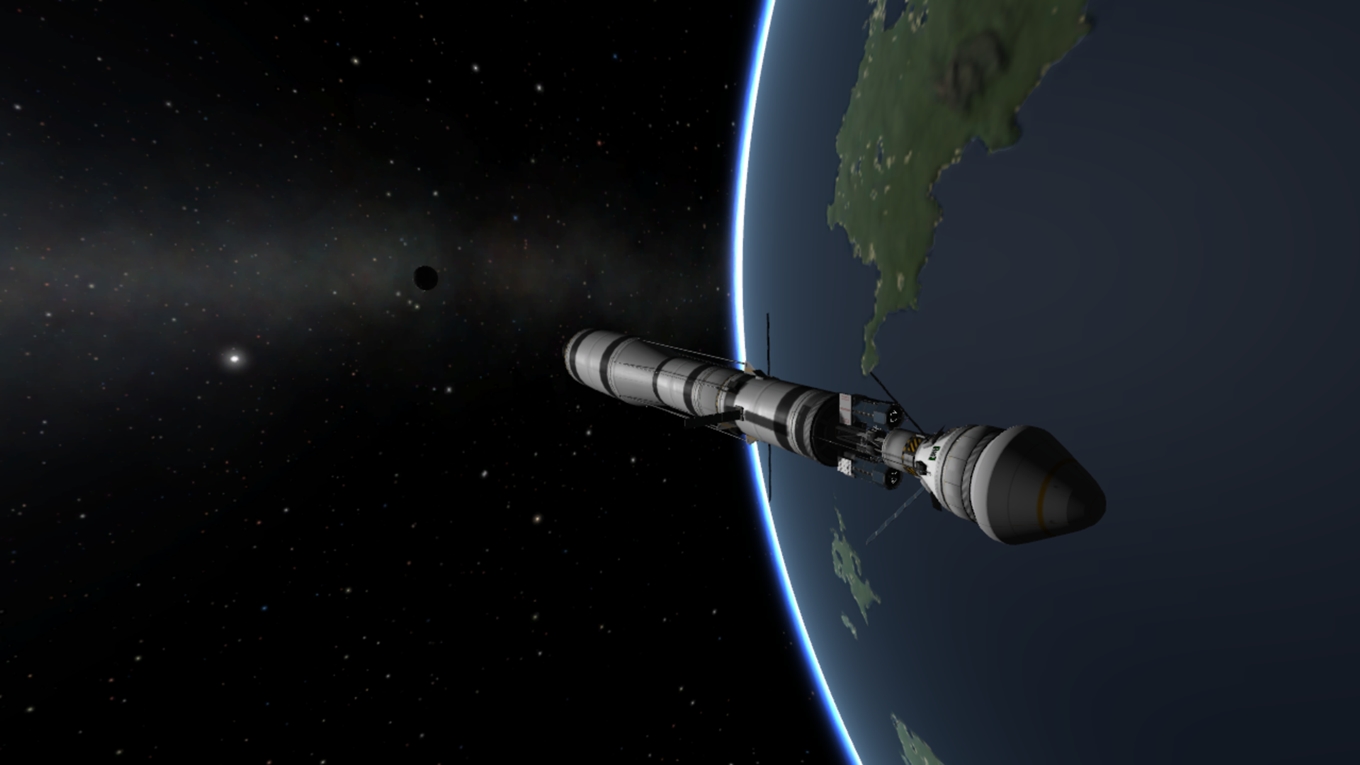
Immáron orbitális pályán várakozva a Duna felé. A jármű elején a „csepp „burkolat alatt helyezkedik el a rover, alatta kettő „ScanSat 2″(szintén nagyon kis méretű járművek, két műszer van rajtuk, Radar és egy Multispektrométer) nevű műhold amiket szintén a Dunához szállítunk. Ezek segítenek majd kiválasztani a leszállás pontos helyét, hol is érdemes majd kutatásokat végezni.
A többit majd a következő oktató videónkból megtudhatjátok a 10 részben! Abban részletesen fogjuk elemezni, hogyan lehet űrjárművet eljuttatni más bolygók köré.
Köszönöm a figyelmeteket!
A cikket írta: Kopasz442